Ako urobit bodovú zváračku z nabíjačky akumulátorov?
Bodová zváračka riadená mikrokontrolérom ATmega88PA.
Josh, 12.07.2010-00:12

Na napájanie ovládacieho obvodu som použil klasiku, transformátor, mostíkový usmerňovač, vyhladzovací kondenzátor a LDO regulátor (stabilizátor). Keďže ovládací obvod má nízky odber, napätie na vstupe stabilizátora bolo vďaka kondenzátoru bez akéhokoľvek zvlnenia. Chybou pri oživovaní obvodu sa mi však podarilo upiecť mikrokontrolér, LCD displej a aj ďalšie komponenty..... nuž aj to sa stáva...

Regulačný (riadiaci) obvod v podstate riadi tyristor pripojený na výstup mostíkového usmerňovača za hlavným transformátorom (na obrázku hore veľké trafo vľavo). Regulátor umožňuje nastaviť dobu zvárania a veľkosť usmerneného prúdu, ktorý je dodávaný do miesta zvaru. Pre dodanie požadovaného množstva energie do zvaru, regulátor ovláda otváranie a zatváranie tyristora počas vopred stanoveného času v každej polperióde sieťového napätia. Na časovanie sa využíva prechod sieťového napätia nulou, ktorý detekuje analógový komparátor, pripojený na výstup druhého usmerňovacieho mostíka cez rezistor R1 (1MOhm). Zenerova dióda obmedzuje napätie na 4,8V, tak aby neprišlo k poškodeniu vstupu mikrokontroléra. Pri prechode zostupnej hrany napätia nulou spustí komparátor čítač/časovač1. Prahová hodnota napätia je nastaviteľná potenciometrom (zero set) nachádzajúcim sa na doske. K regulátoru som taktiež pridal prúdový senzor, ktorý sa mi povaľoval na stole ešte od projektu snímania prúdu z alternátora. Je to niečo naviac, ale umožňuje merať špičkovú hodnotu pretekajúceho prúdu a zobrazovať ju na LCD displeji.

Firmware mikrokontroléru ATmega88PA (pracujúceho na 8MHz) skompilovaný s pomocou AVR-GCC pod AVRStudio IDE nájdete vo výpise na konci článku, alebo na homepage autora.
Mikrokontrolér zobrazuje na displeji informácie o veľkosti energie privedenej do bodu zvaru, dĺžku trvania zvaru spolu s maximálnym prúdom tečúcim počas posledného uskutočneného zvaru a teplotou vo vnútri prístroja z interného senzora nachádzajúceho sa v mikrokontroléri. Mikrokontrolér taktiež zaobstaráva časovanie, detekciu prechodu napätia nulou a riadenie tyristora. Riadiaca elektróda tyristora je ovládaná cez PMOS tranzistor Q1, ktorý je riadený jedným z pinov mikrokontroléra, nie však priamo, ale cez NPN tranzistor T2 (viď. schéma).
Zváranie sa spúšta pomocou nožného spínača pripojeného na ďalší vstup mikrokontroléra. Oba vstupné signály, signál pochádzajúci z nožného spínača, aj detekcia prechodu sieťového napätia nulou sú vzorkované a synchronizované rutinou vo firmvéri tak, aby nedochádzalo k chybám pri spúšťaní. Systém taktiež kontroluje vstup nožného spínača pri zapnutí napájania prístroja ako aj po skončení zvárania (doby zvaru). Pokiaľ je nožný spínač stlačený, tak systém čaká na jeho uvoľnenie a užívateľ je o tejto skutočnosti informovaný výpisom na displeji. Týmto sa zvyšuje bezpečnosť a odstraňuje sa náhodné spustenie zvárania (zákmity príp. iné možné rušenie). Doba zvaru je nastaviteľná približne od jednej po 60 periód (1s) sieťového napätia. Ovládanie privádzaného výkonu umožňuje, aby sa do miesta zvaru dostalo od 5% do 95% prúdu každej pol periódy. Veľkosť napätia na katóde tyristora je po predelení rezistorovým deličom 10:1 k dispozícii na pine PC2 a pin je chránený zenerovou diódou D2, aby neprišlo k jeho poškodeniu. Neskôr som zistil, že informáciu o veľkosti tohto napätia nebudem potrebovať a tak sa vo firmware s pinom nepracuje.
Na výstup zváračky som zapojil ochranný výkonový rezistor s odporom niekoľko desatín Ohmu (použil som uhlíkovú tyčinku, pretože pracujem v továrni na výrobu uhlíka a tým pádom som to mal zadarmo), ktorý obmedzuje výstupný prúd na úroveň, pri ktorej nedôjde k poškodeniu diód a tyristora. Zdroj je krátkodobo preťažovaný odberom prúdu 130A. Vyzerá to tak, že zdroj tieto krátke prúdové nárazy veľmi dobre zvláda.
Poznámka: Ale 130A predsa len nie je dosť. Vymenil som teda vodiče na vstupe vedúce ku diódam a tyristoru za iné zo silnejším priezerom a potom som mohol zmenou hodnoty odporu rezistora (mojej uhlíkovej tyčky), alebo jej odstránením zväčšiť prúd, ktorý sa privádza do bodu zvaru. Ukázalo sa, že aj prítlak elektródy na spoj je dôležitý, ale ešte stále zisťujem ako ovplyvňuje proces zvárania.
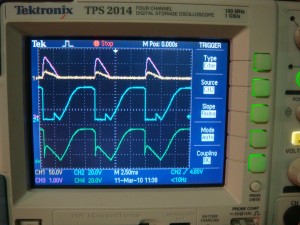
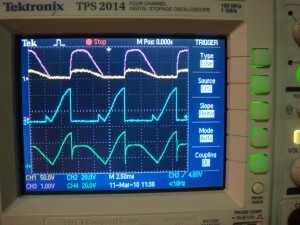
Na nasledujúcich obrázkoch vidíme niekoľko časových priebehov, meraných na rôznych miestach zapojenia. Žltou farbou je zobrazené výstupné napätie, ktoré sa zdá byť malé, ale v skutočnosti tomu tak nie je (na danom kanále osciloskopu je nastavené vertikálne rozlíšenie 50V/dielik). Fialovou farbou je zobrazený priebeh výstupného prúdu meraného Hallovým snímačom, modrou je zobrazený priebeh napätia na gate tranzistora, ktorým sa riadi tyristor a zelená je napätie na mostíku.
Tento projekt mi vnukol celkom zaujímavú myšlienku ako upraviť moju starú zváračku. Mám niekoľko veľkokapacitných kondenzátorov a IGBT tranzistorov zo starých budiacich jednotiek určených pre motory, z ktorých by sa dala urobiť celkom pekná TIG zváračka. Myslím, že som čítal o možnosti zvárať prúdom obdĺžnikového priebehu pri frekvenciách 1 - 2 kHz. Ak si dobre spomínam, takýto priebeh prúdu z kladnou jednosmernou zložkou sa používa v niektorých typoch TIG zváračiek. Ktokoľvek s informáciami o danej problematike mi kludne môže poslať mail, ja sa len poteším.
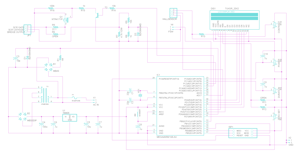
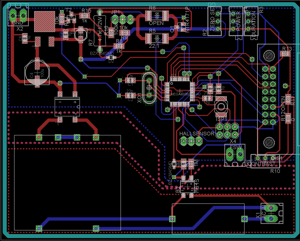
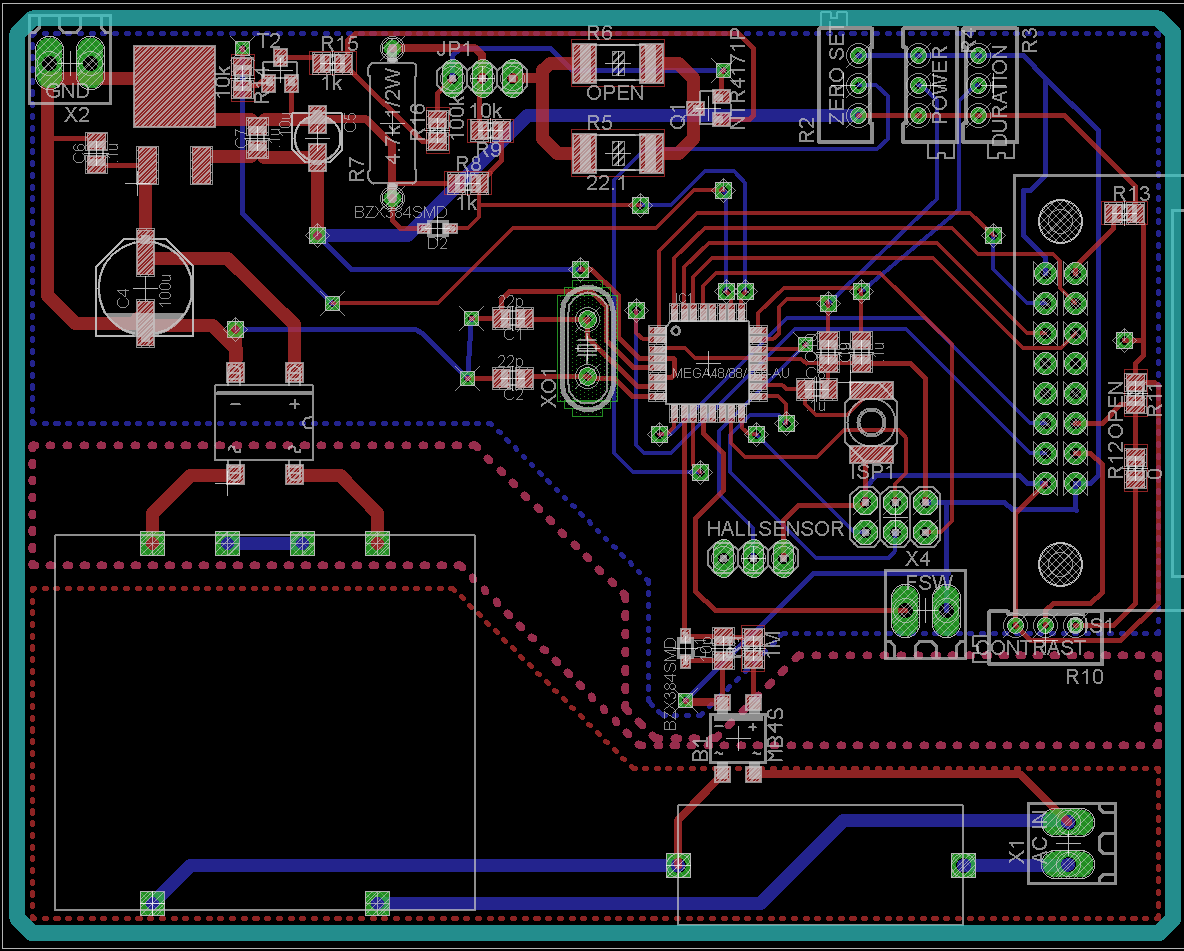
Na posledných dvoch obrázkoch sa nachádzajú schéma zapojenia a návrh dosky plošných spojov.
A kód? S kódom je všetko v poriadku a je plne funkčný, akurát som nakoniec musel poprepájať niektoré veci, takže predtým ako sa pustíte do stavby si ešte raz skontrolujte, či sedia I/O piny.
Zverejnené zo súhlasom autora.
Homepage projektu: http://www.imsolidstate.com/archives/590
Preklad: Kiwwicek
tento článok je z mikroZONE
( https://www.mikrozone.sk/pluginy/content/content.php?content.61 )
Bodová zváračka riadená mikrokontrolérom ATmega88PA.
Josh, 12.07.2010-00:12

Na napájanie ovládacieho obvodu som použil klasiku, transformátor, mostíkový usmerňovač, vyhladzovací kondenzátor a LDO regulátor (stabilizátor). Keďže ovládací obvod má nízky odber, napätie na vstupe stabilizátora bolo vďaka kondenzátoru bez akéhokoľvek zvlnenia. Chybou pri oživovaní obvodu sa mi však podarilo upiecť mikrokontrolér, LCD displej a aj ďalšie komponenty..... nuž aj to sa stáva...

Regulačný (riadiaci) obvod v podstate riadi tyristor pripojený na výstup mostíkového usmerňovača za hlavným transformátorom (na obrázku hore veľké trafo vľavo). Regulátor umožňuje nastaviť dobu zvárania a veľkosť usmerneného prúdu, ktorý je dodávaný do miesta zvaru. Pre dodanie požadovaného množstva energie do zvaru, regulátor ovláda otváranie a zatváranie tyristora počas vopred stanoveného času v každej polperióde sieťového napätia. Na časovanie sa využíva prechod sieťového napätia nulou, ktorý detekuje analógový komparátor, pripojený na výstup druhého usmerňovacieho mostíka cez rezistor R1 (1MOhm). Zenerova dióda obmedzuje napätie na 4,8V, tak aby neprišlo k poškodeniu vstupu mikrokontroléra. Pri prechode zostupnej hrany napätia nulou spustí komparátor čítač/časovač1. Prahová hodnota napätia je nastaviteľná potenciometrom (zero set) nachádzajúcim sa na doske. K regulátoru som taktiež pridal prúdový senzor, ktorý sa mi povaľoval na stole ešte od projektu snímania prúdu z alternátora. Je to niečo naviac, ale umožňuje merať špičkovú hodnotu pretekajúceho prúdu a zobrazovať ju na LCD displeji.
Firmware mikrokontroléru ATmega88PA (pracujúceho na 8MHz) skompilovaný s pomocou AVR-GCC pod AVRStudio IDE nájdete vo výpise na konci článku, alebo na homepage autora.
Mikrokontrolér zobrazuje na displeji informácie o veľkosti energie privedenej do bodu zvaru, dĺžku trvania zvaru spolu s maximálnym prúdom tečúcim počas posledného uskutočneného zvaru a teplotou vo vnútri prístroja z interného senzora nachádzajúceho sa v mikrokontroléri. Mikrokontrolér taktiež zaobstaráva časovanie, detekciu prechodu napätia nulou a riadenie tyristora. Riadiaca elektróda tyristora je ovládaná cez PMOS tranzistor Q1, ktorý je riadený jedným z pinov mikrokontroléra, nie však priamo, ale cez NPN tranzistor T2 (viď. schéma).
Zváranie sa spúšta pomocou nožného spínača pripojeného na ďalší vstup mikrokontroléra. Oba vstupné signály, signál pochádzajúci z nožného spínača, aj detekcia prechodu sieťového napätia nulou sú vzorkované a synchronizované rutinou vo firmvéri tak, aby nedochádzalo k chybám pri spúšťaní. Systém taktiež kontroluje vstup nožného spínača pri zapnutí napájania prístroja ako aj po skončení zvárania (doby zvaru). Pokiaľ je nožný spínač stlačený, tak systém čaká na jeho uvoľnenie a užívateľ je o tejto skutočnosti informovaný výpisom na displeji. Týmto sa zvyšuje bezpečnosť a odstraňuje sa náhodné spustenie zvárania (zákmity príp. iné možné rušenie). Doba zvaru je nastaviteľná približne od jednej po 60 periód (1s) sieťového napätia. Ovládanie privádzaného výkonu umožňuje, aby sa do miesta zvaru dostalo od 5% do 95% prúdu každej pol periódy. Veľkosť napätia na katóde tyristora je po predelení rezistorovým deličom 10:1 k dispozícii na pine PC2 a pin je chránený zenerovou diódou D2, aby neprišlo k jeho poškodeniu. Neskôr som zistil, že informáciu o veľkosti tohto napätia nebudem potrebovať a tak sa vo firmware s pinom nepracuje.
Na výstup zváračky som zapojil ochranný výkonový rezistor s odporom niekoľko desatín Ohmu (použil som uhlíkovú tyčinku, pretože pracujem v továrni na výrobu uhlíka a tým pádom som to mal zadarmo), ktorý obmedzuje výstupný prúd na úroveň, pri ktorej nedôjde k poškodeniu diód a tyristora. Zdroj je krátkodobo preťažovaný odberom prúdu 130A. Vyzerá to tak, že zdroj tieto krátke prúdové nárazy veľmi dobre zvláda.
Poznámka: Ale 130A predsa len nie je dosť. Vymenil som teda vodiče na vstupe vedúce ku diódam a tyristoru za iné zo silnejším priezerom a potom som mohol zmenou hodnoty odporu rezistora (mojej uhlíkovej tyčky), alebo jej odstránením zväčšiť prúd, ktorý sa privádza do bodu zvaru. Ukázalo sa, že aj prítlak elektródy na spoj je dôležitý, ale ešte stále zisťujem ako ovplyvňuje proces zvárania.
Na nasledujúcich obrázkoch vidíme niekoľko časových priebehov, meraných na rôznych miestach zapojenia. Žltou farbou je zobrazené výstupné napätie, ktoré sa zdá byť malé, ale v skutočnosti tomu tak nie je (na danom kanále osciloskopu je nastavené vertikálne rozlíšenie 50V/dielik). Fialovou farbou je zobrazený priebeh výstupného prúdu meraného Hallovým snímačom, modrou je zobrazený priebeh napätia na gate tranzistora, ktorým sa riadi tyristor a zelená je napätie na mostíku.
Tento projekt mi vnukol celkom zaujímavú myšlienku ako upraviť moju starú zváračku. Mám niekoľko veľkokapacitných kondenzátorov a IGBT tranzistorov zo starých budiacich jednotiek určených pre motory, z ktorých by sa dala urobiť celkom pekná TIG zváračka. Myslím, že som čítal o možnosti zvárať prúdom obdĺžnikového priebehu pri frekvenciách 1 - 2 kHz. Ak si dobre spomínam, takýto priebeh prúdu z kladnou jednosmernou zložkou sa používa v niektorých typoch TIG zváračiek. Ktokoľvek s informáciami o danej problematike mi kludne môže poslať mail, ja sa len poteším.
Na posledných dvoch obrázkoch sa nachádzajú schéma zapojenia a návrh dosky plošných spojov.

A kód? S kódom je všetko v poriadku a je plne funkčný, akurát som nakoniec musel poprepájať niektoré veci, takže predtým ako sa pustíte do stavby si ešte raz skontrolujte, či sedia I/O piny.
- #include <avr/io.h> // basic io header
- #include <util/delay.h> // time header
- #include <avr/interrupt.h> // Interrupt header
- //#include <avr/wdt.h> // can’t get the watchdog to work yet
- #define F_CPU 8000000; //8MHz
- //function declarations
- void lcd_write_byte(unsigned char CONTROL, unsigned char DATA);
- void initLCD(void);
- void updateLCD(void);
- void switch_up(void);
- void weld_message(void);
- //global variables
- volatile unsigned int power, duration, temperature;
- volatile unsigned char current, max_current;
- void main(void)
- {
- unsigned int old_power, old_duration= 0; //variables for comparison
- PRR &= ~(1<<PRADC); //disable ADC power reduction
- ADMUX |= (1<<REFS0); //setup VCC as reference
- ADMUX |= (1<<ADLAR); //left adjust result for 8 bit ADC
- ADCSRA |= (1<<ADPS0)|(1<<ADPS1)|(1<<ADPS2); //prescaler clk/64 125kHz @ 8MHz clock
- ADCSRA |= (1<<ADEN); //enable ADC
- TCCR1B |= (1<<CS10); //enable timer1, no prescale (clk/1)
- ACSR |= (1<<ACIS1); //enable analog comparator falling edge interrupt
- ACSR |= (1<<ACIE); //enable analog comparator interrupt
- DDRC |= (1<<PORTC3); //SCR gate drive
- DDRC &= ~((1<<PORTC0)|(1<<PORTC1)|(1<<PORTC2)); //set as input
- PORTC &= ~((1<<PORTC0)|(1<<PORTC1)|(1<<PORTC2)); //PUD
- DDRD |= (1<<PORTD0)|(1<<PORTD1)|(1<<PORTD2)|(1<<PORTD3)|(1<<PORTD4)|(1<<PORTD5);
- DDRD &= ~((1<<PORTD6)|(1<<PORTD7)); //set as input
- PORTD &= ~((1<<PORTD6)|(1<<PORTD7)); //PUD
- DDRB &= ~(1<<PORTB0); //footswitch input
- PORTB &= ~(1<<PORTB0); //PUD
- initLCD(); //set up LCD
- switch_up(); //check footswitch
- max_current= 0×7F;
- updateLCD(); //display settings
- // wdt_reset(); //reset the watchdog timer
- // WDTCSR |= (1<<WDCE)|(1<<WDE); //clear the system reset/ change enable bits
- // WDTCSR |= (1<<WDE)|(1<<WDP0)|(1<<WDP1)|(1<<WDP2); //set new prescaler, 2 seconds
- while(1)
- {
- old_power= power; //set up the comparsison value before getting new value
- ADMUX &= ~((1<<MUX0)|(1<<MUX1)|(1<<MUX2)|(1<<MUX3)); //sample ADC0 (power setting)
- ADCSRA |= (1<<ADSC); //start conversion
- while(ADCSRA & (1<<ADSC)){} //wait for conversion
- power= ADCH;
- power*= 234; //scale power for use later: ((2^8)*234)= 59904 max value
- //59904 clk cycles= (1/8000000)*59904= 7.5ms
- //7.5ms= (.0075/(1/120))*100= 90% of one half wave (60Hz)
- //with these values power can be up to 90% of each half wave,
- //which with the 5% coded into the ISR, yields a range of 5%-95%.
- old_duration= duration; //set up the comparsison value before getting new value
- ADMUX |= (1<<MUX0); //sample ADC1 (duration setting)
- ADCSRA |= (1<<ADSC); //start conversion
- while(ADCSRA & (1<<ADSC)){} //wait for conversion
- duration= ADCH;
- duration= (duration>>1); //convert to 7-bit number, limits duration to ~1 second
- if(duration<=0×0007) duration= 0×0000;
- else duration-= 0×0007; //subtract 7 so duration can’t exceed 3 digits (999ms)
- ADMUX &= ~((1<<MUX0)|(1<<MUX1)|(1<<MUX2)); //set up for ADC8 (temp)
- ADMUX |= (1<<MUX3);
- ADMUX |= (1<<REFS0)|(1<<REFS1); //1.1V ADC reference
- ADMUX &= ~(1<<ADLAR); //undo left adjust result for 8 bit ADC
- ADCSRA |= (1<<ADSC); //start conversion
- while(ADCSRA & (1<<ADSC)){} //wait for conversion
- temperature= ADC;
- temperature/= 12; //scale temp value to degrees C
- ADMUX |= (1<<ADLAR); //restore left adjust result
- ADMUX &= ~(1<<REFS1); //restore VCC ADC reference
- if(power!=old_power) updateLCD(); //update LCD if values changed
- else if(duration!=old_duration) updateLCD();
- if((!(PINB & (1<<PINB0))) & (duration>0)) //check for footswitch input
- {
- char j= 0;
- for(j= 0;j< 3;) //three sample noise filter
- {
- if(!(PINB & (1<<PINB0))) j++; //increment loop value if PORTC2 (fsw) is low
- else j= 4; //break out of the loop if high
- }
- if(j==3) //should only get here if we got three low samples
- {
- weld_message();
- ADMUX |= (1<<MUX0)|(1<<MUX1)|(1<<MUX2); //sample ADC7 (current sensor)
- ADMUX &= ~(1<<MUX3);
- ADCSRA |= (1<<ADATE); //ADC free runnnng mode
- ADCSRA |= (1<<ADSC); //start conversion
- _delay_us(5); //wait for ADC’s first reading
- max_current= 0×0000; //reset max current from last cycle
- sei();
- while((!(PINB & (1<<PINB0))) & (duration>0)){} //wait for zero cross
- cli();
- ADCSRA &= ~(1<<ADATE); //turn off free running
- switch_up(); //wait for footswitch release
- updateLCD();
- }
- }
- }
- }
- ISR (ANALOG_COMP_vect)
- {
- char i= 0;
- for(i= 0;i< 3;) //three sample noise filter
- {
- if(!(ACSR & (1<<ACO))) i++; //increment loop value if ACO is low
- else i= 4; //break out of the loop if high
- }
- if(i==3) //should only get here if we got three low samples,
- { //which indicates a zero crossing.
- TCNT1= 0;
- while(TCNT1< power){} //wait for phase rotation
- PORTC |= (1<<PORTC3); //fire SCR
- while(TCNT1< 63333) //wait for 7.9ms, 95% of one half cycle (60Hz)
- {
- current= ADCH;
- if(current>max_current) max_current= current; //record the highest value
- }
- PORTC &= ~(1<<PORTC3); //turn off SCR gate
- duration–;
- }
- }
- void initLCD(void)
- {
- _delay_ms(250); // Wait for HD44780
- PORTD &= ~(1<<PORTD4);
- PORTD |= (1<<PORTD1);
- PORTD |= (1<<PORTD0);
- PORTD |= (1<<PORTD5); // function set
- _delay_ms(2);
- PORTD &= ~(1<<PORTD5);
- _delay_ms(20);
- PORTD |= (1<<PORTD5); // function set
- _delay_ms(2);
- PORTD &= ~(1<<PORTD5);
- _delay_ms(10);
- PORTD |= (1<<PORTD5); // function set
- _delay_ms(2);
- PORTD &= ~(1<<PORTD5);
- _delay_ms(10);
- PORTD &= ~(1<<PORTD0);
- PORTD |= (1<<PORTD5); // initialize to 4 bit
- _delay_ms(2);
- PORTD &= ~(1<<PORTD5);
- _delay_ms(10);
- lcd_write_byte(0,0×28); //set interface width, # of lines, and font size
- lcd_write_byte(0,0×0C); //display on
- lcd_write_byte(0,0×01); //clear display
- lcd_write_byte(0,0×06); //increment address by one, shift cursor at write
- }
- void lcd_write_byte(unsigned char CONTROL, unsigned char DATA)
- {
- if(CONTROL == 1) PORTD |= (1<<PORTD4); else PORTD &= ~(1<<PORTD4);
- if((DATA & 0×80) == 0×80) PORTD |= (1<<PORTD3); else PORTD &= ~(1<<PORTD3);
- if((DATA & 0×40) == 0×40) PORTD |= (1<<PORTD2); else PORTD &= ~(1<<PORTD2);
- if((DATA & 0×20) == 0×20) PORTD |= (1<<PORTD1); else PORTD &= ~(1<<PORTD1);
- if((DATA & 0×10) == 0×10) PORTD |= (1<<PORTD0); else PORTB &= ~(1<<PORTD0);
- PORTD |= (1<<PORTD5);
- _delay_ms(1);
- PORTD &= ~(1<<PORTD5);
- if((DATA & 0×08) == 0×08) PORTD |= (1<<PORTD3); else PORTD &= ~(1<<PORTD3);
- if((DATA & 0×04) == 0×04) PORTD |= (1<<PORTD2); else PORTD &= ~(1<<PORTD2);
- if((DATA & 0×02) == 0×02) PORTD |= (1<<PORTD1); else PORTD &= ~(1<<PORTD1);
- if((DATA & 0×01) == 0×01) PORTD |= (1<<PORTD0); else PORTD &= ~(1<<PORTD0);
- PORTD |= (1<<PORTD5);
- _delay_ms(2);
- PORTD &= ~(1<<PORTD5);
- _delay_ms(10);
- }
- void updateLCD(void)
- {
- unsigned int temp_duration, temp_power, temp_max_current;
- temp_duration= (duration*8); //scale duration for BCD conversion to milliseconds //
- unsigned int duration_BCD= ((((temp_duration/10)+((temp_duration/100)*6))*16)+(temp_duration%10));
- unsigned char ONES= 0×00;
- unsigned char TENS= 0×00;
- unsigned char HUND= 0×00;
- if((duration_BCD & 0×0800) == 0×0800) HUND |= 0×08; else HUND &= ~0×08;
- if((duration_BCD & 0×0400) == 0×0400) HUND |= 0×04; else HUND &= ~0×04;
- if((duration_BCD & 0×0200) == 0×0200) HUND |= 0×02; else HUND &= ~0×02;
- if((duration_BCD & 0×0100) == 0×0100) HUND |= 0×01; else HUND &= ~0×01;
- if((duration_BCD & 0×0080) == 0×0080) TENS |= 0×08; else TENS &= ~0×08;
- if((duration_BCD & 0×0040) == 0×0040) TENS |= 0×04; else TENS &= ~0×04;
- if((duration_BCD & 0×0020) == 0×0020) TENS |= 0×02; else TENS &= ~0×02;
- if((duration_BCD & 0×0010) == 0×0010) TENS |= 0×01; else TENS &= ~0×01;
- if((duration_BCD & 0×0008) == 0×0008) ONES |= 0×08; else ONES &= ~0×08;
- if((duration_BCD & 0×0004) == 0×0004) ONES |= 0×04; else ONES &= ~0×04;
- if((duration_BCD & 0×0002) == 0×0002) ONES |= 0×02; else ONES &= ~0×02;
- if((duration_BCD & 0×0001) == 0×0001) ONES |= 0×01; else ONES &= ~0×01;
- ONES |= 0×30;
- TENS |= 0×30;
- HUND |= 0×30;
- lcd_write_byte(0×00, 0×01); //clear screen
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, HUND);
- lcd_write_byte(0×01, TENS);
- lcd_write_byte(0×01, ONES);
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×6D); //’m’
- lcd_write_byte(0×01, 0×69); //’i’
- lcd_write_byte(0×01, 0×6C); //’l’
- lcd_write_byte(0×01, 0×6C); //’l’
- lcd_write_byte(0×01, 0×69); //’i’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×63); //’c’
- lcd_write_byte(0×01, 0×6F); //’o’
- lcd_write_byte(0×01, 0×6E); //’n’
- lcd_write_byte(0×01, 0×64); //’d’
- lcd_write_byte(0×01, 0×73); //’s’
- temp_power= (power/665); //scale power for BCD conversion to percent
- temp_power=(95-temp_power);
- unsigned int power_BCD= ((temp_power/10)*16)+(temp_power%10);
- ONES= 0×00;
- TENS= 0×00;
- if((power_BCD & 0×0080) == 0×0080) TENS |= 0×08; else TENS &= ~0×08;
- if((power_BCD & 0×0040) == 0×0040) TENS |= 0×04; else TENS &= ~0×04;
- if((power_BCD & 0×0020) == 0×0020) TENS |= 0×02; else TENS &= ~0×02;
- if((power_BCD & 0×0010) == 0×0010) TENS |= 0×01; else TENS &= ~0×01;
- if((power_BCD & 0×0008) == 0×0008) ONES |= 0×08; else ONES &= ~0×08;
- if((power_BCD & 0×0004) == 0×0004) ONES |= 0×04; else ONES &= ~0×04;
- if((power_BCD & 0×0002) == 0×0002) ONES |= 0×02; else ONES &= ~0×02;
- if((power_BCD & 0×0001) == 0×0001) ONES |= 0×01; else ONES &= ~0×01;
- ONES |= 0×30;
- TENS |= 0×30;
- lcd_write_byte(0×00, 0xC0); //go to second line
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, TENS);
- lcd_write_byte(0×01, ONES);
- lcd_write_byte(0×01, 0×25); //’%’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×6F); //’o’
- lcd_write_byte(0×01, 0×66); //’f’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×70); //’p’
- lcd_write_byte(0×01, 0×68); //’h’
- lcd_write_byte(0×01, 0×61); //’a’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×65); //’e’
- temp_max_current= max_current;
- temp_max_current-= 0×7F; //remove 2.5V sensor offset
- temp_max_current*= 3; //scaling
- temp_max_current/= 2; //scaling
- unsigned int max_current_BCD= ((((temp_max_current/10)+((temp_max_current/100)*6))*16)+(temp_max_current%10));
- ONES= 0×00;
- TENS= 0×00;
- HUND= 0×00;
- if((max_current_BCD & 0×0800) == 0×0800) HUND |= 0×08; else HUND &= ~0×08;
- if((max_current_BCD & 0×0400) == 0×0400) HUND |= 0×04; else HUND &= ~0×04;
- if((max_current_BCD & 0×0200) == 0×0200) HUND |= 0×02; else HUND &= ~0×02;
- if((max_current_BCD & 0×0100) == 0×0100) HUND |= 0×01; else HUND &= ~0×01;
- if((max_current_BCD & 0×0080) == 0×0080) TENS |= 0×08; else TENS &= ~0×08;
- if((max_current_BCD & 0×0040) == 0×0040) TENS |= 0×04; else TENS &= ~0×04;
- if((max_current_BCD & 0×0020) == 0×0020) TENS |= 0×02; else TENS &= ~0×02;
- if((max_current_BCD & 0×0010) == 0×0010) TENS |= 0×01; else TENS &= ~0×01;
- if((max_current_BCD & 0×0008) == 0×0008) ONES |= 0×08; else ONES &= ~0×08;
- if((max_current_BCD & 0×0004) == 0×0004) ONES |= 0×04; else ONES &= ~0×04;
- if((max_current_BCD & 0×0002) == 0×0002) ONES |= 0×02; else ONES &= ~0×02;
- if((max_current_BCD & 0×0001) == 0×0001) ONES |= 0×01; else ONES &= ~0×01;
- ONES |= 0×30;
- TENS |= 0×30;
- HUND |= 0×30;
- lcd_write_byte(0×00, 0×95); //go to third line (DDRAM address 0×15)
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, HUND);
- lcd_write_byte(0×01, TENS);
- lcd_write_byte(0×01, ONES);
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×61); //’a’
- lcd_write_byte(0×01, 0×6D); //’m’
- lcd_write_byte(0×01, 0×70); //’p’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×28); //’(’
- lcd_write_byte(0×01, 0×6D); //’m’
- lcd_write_byte(0×01, 0×61); //’a’
- lcd_write_byte(0×01, 0×78); //’x’
- lcd_write_byte(0×01, 0×29); //’)’
- unsigned int temperature_BCD= ((temperature/10)*16)+(temperature%10);
- ONES= 0×00;
- TENS= 0×00;
- if((temperature_BCD & 0×0080) == 0×0080) TENS |= 0×08; else TENS &= ~0×08;
- if((temperature_BCD & 0×0040) == 0×0040) TENS |= 0×04; else TENS &= ~0×04;
- if((temperature_BCD & 0×0020) == 0×0020) TENS |= 0×02; else TENS &= ~0×02;
- if((temperature_BCD & 0×0010) == 0×0010) TENS |= 0×01; else TENS &= ~0×01;
- if((temperature_BCD & 0×0008) == 0×0008) ONES |= 0×08; else ONES &= ~0×08;
- if((temperature_BCD & 0×0004) == 0×0004) ONES |= 0×04; else ONES &= ~0×04;
- if((temperature_BCD & 0×0002) == 0×0002) ONES |= 0×02; else ONES &= ~0×02;
- if((temperature_BCD & 0×0001) == 0×0001) ONES |= 0×01; else ONES &= ~0×01;
- ONES |= 0×30;
- TENS |= 0×30;
- lcd_write_byte(0×00, 0xD5); //go to fourth line (DDRAM address 0×55)
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, TENS);
- lcd_write_byte(0×01, ONES);
- lcd_write_byte(0×01, 0xDF); //degree symbol
- lcd_write_byte(0×01, 0×43); //’C’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×63); //’c’
- lcd_write_byte(0×01, 0×61); //’a’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×74); //’t’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×6D); //’m’
- lcd_write_byte(0×01, 0×70); //’p’
- }
- void switch_up(void)
- {
- if(!(PINB & (1<<PINB0)))
- {
- lcd_write_byte(0×00, 0×01); //clear screen
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×72); //’r’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×6C); //’l’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×61); //’a’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×66); //’f’
- lcd_write_byte(0×01, 0×6F); //’o’
- lcd_write_byte(0×01, 0×6F); //’o’
- lcd_write_byte(0×01, 0×74); //’t’
- lcd_write_byte(0×01, 0×73); //’s’
- lcd_write_byte(0×01, 0×77); //’w’
- lcd_write_byte(0×01, 0×69); //’i’
- lcd_write_byte(0×01, 0×74); //’t’
- lcd_write_byte(0×01, 0×63); //’c’
- lcd_write_byte(0×01, 0×68); //’h’
- while(!(PINB & (1<<PINB0))){};
- }
- }
- void weld_message(void)
- {
- lcd_write_byte(0×00, 0×01); //clear screen
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×20); //space
- lcd_write_byte(0×01, 0×77); //’w’
- lcd_write_byte(0×01, 0×65); //’e’
- lcd_write_byte(0×01, 0×6C); //’l’
- lcd_write_byte(0×01, 0×64); //’d’
- lcd_write_byte(0×01, 0×69); //’i’
- lcd_write_byte(0×01, 0×6E); //’n’
- lcd_write_byte(0×01, 0×67); //’g’
- lcd_write_byte(0×01, 0×2E); //’.’
- lcd_write_byte(0×01, 0×2E); //’.’
- lcd_write_byte(0×01, 0×2E); //’.’
- }
Zverejnené zo súhlasom autora.
Homepage projektu: http://www.imsolidstate.com/archives/590
Preklad: Kiwwicek
tento článok je z mikroZONE
( https://www.mikrozone.sk/pluginy/content/content.php?content.61 )